|
Ziwei Wang is currently an assistant professor in School of Electrical and Electronic Engineering, Nanyang Technological University and the director of Perception and embodied INtElligence (PINE) Lab. Before joining NTU, he was a postdoc fellow in Robotics Institute, Carnegie Mellon University, with Prof. Changliu Liu. He received the Ph.D and the B.S degrees from the Department of Automation, Tsinghua University in 2023 and the Department of Physics, Tsinghua University in 2018 respectively. His research goal is to design foundation models (FMs) for robotic manipulation. He has published over 50 scientific papers in TPAMI, IJCV, RAL, CVPR, ICCV, ECCV, NeurIPS, CoRL, IROS and ICRA. He serves as a regular reviewer member for a variety of conferences and journals. I am looking for self-motivated PhD/Postdoc/Master/research assistant. If you are interested in joining our lab, please drop me an email at ziwei.wang@ntu.edu.sg with your CV. |
|
|
|
|
|
|
Haoyuan Deng, Yitong Gao, Yudong Lin, Haichao Liu, Zhenyu Wu, Ziwei Wang Arxiv, 2026 [PDF] [Website] [Video] |
|
Haichao Liu, Yuyao Jiang, Hyunsun Park, Yuanjiang Xue, Ziwei Wang Arxiv, 2026 [PDF] [Website] |
|
|
|
Guanxing Lu, Wenkai Guo, Chubin Zhang, Yuheng Zhou, Haonan Jiang, Zifeng Gao, Yansong Tang, Ziwei Wang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026 [PDF] [Code] |
|
|
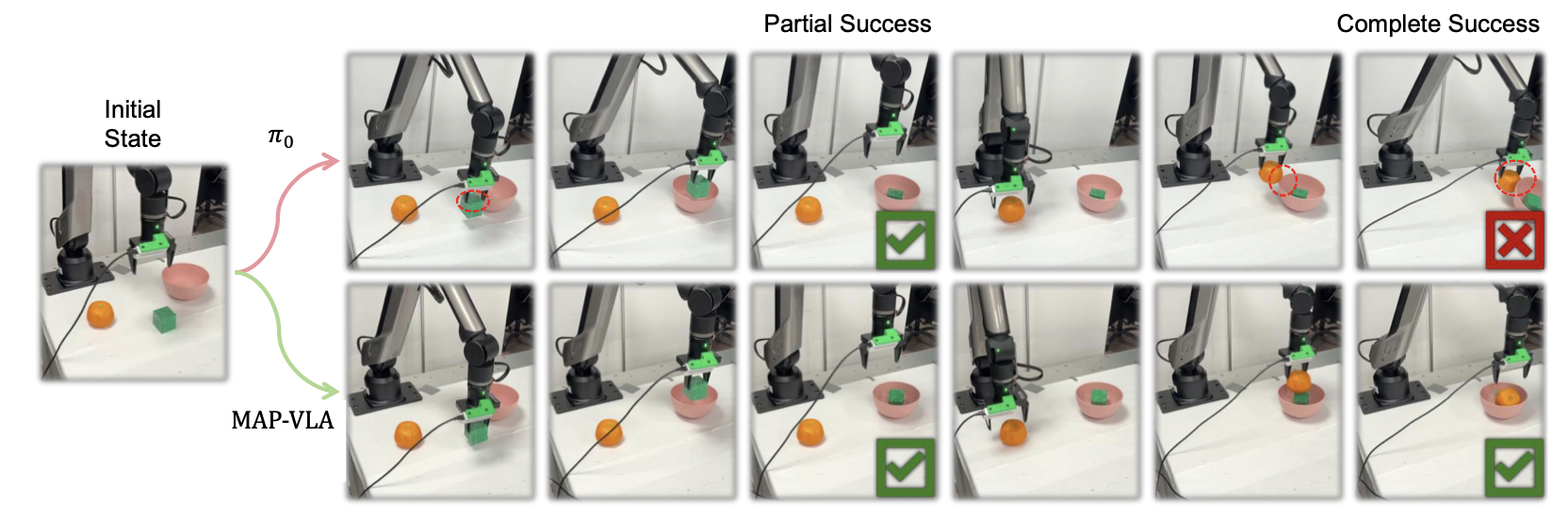
Haoyuan Deng, Yudong Lin, Yuanjiang Xue, Haoyang Du, Qianzhun Wang, Boyang Zhou, Zhenyu Wu, Ziwei Wang IEEE Robotics and Automation Letters (RA-L), 2026 [PDF] [Website] [Video] [Code] [Appendix] |
|
Chuanrui Zhang, Zhengxian Wu, Guanxing Lu, Yansong Tang, Ziwei Wang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026. [PDF] [Website] |
|
Ziyu Shan, Zhenyu Wu, Xiaofeng Wang, Zheng Zhu, Ziwei Wang European Conference on Computer Vision (ECCV), 2026 [PDF] [Website] |
|
Zi-han Ding, Ziwei Wang IEEE Robotics and Automation Letters (RA-L), 2026 [PDF] |
|
Ziyu Shan, Yuheng Zhou, Gaoyuan Wu, Ziheng Ji, Zhenyu Wu, Ziwei Wang IEEE Robotics and Automation Letters (RA-L), 2026 [PDF] [Code] |
|
|
Chuanrui Zhang, Minghan Qin, Yuang Wang, Baifeng Xie, Hang Li, Ziwei Wang ACM SIGGRAPH, 2026. [PDF] [Video] [Website] |
|
|
Chuanrui Zhang, Yingshuang Zou, ZhengXian Wu, Yonggen Ling, Yuxiao Yang, Ziwei Wang IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026. [PDF] [Code] [Website] |
|
Wenkai Guo, Guanxing Lu, Haoyuan Deng, Zhenyu Wu, Yansong Tang, Ziwei Wang IEEE International Conference on Robotics and Automation (ICRA), 2026. [PDF] |
|
Runhao Li, Wenkai Guo, Zhenyu Wu, Changyuan Wang, Haoyuan Deng, Zhenyu Weng, Yap-Peng Tan, Ziwei Wang IEEE International Conference on Robotics and Automation (ICRA), 2026. [PDF] |
|
Haoyuan Deng, Wenkai Guo, Qianzhun Wang, Zhenyu Wu, Ziwei Wang 9th Conference on Robot Learning (CoRL), 2025. [PDF] [Website] |
|
Zongzheng Zhang, Chenghao Yue, Haobo Xu, Minwen Liao, Xianglin Qi, Huan-ang Gao, Ziwei Wang, Hao Zhao 9th Conference on Robot Learning (CoRL), 2025. [PDF] [Website] [Video] |
|
Zhenyu Wu, Angyuan Ma, Xiuwei Xu, Hang Yin, Yinan Liang, Ziwei Wang, Jiwen Lu, Haibin Yan 9th Conference on Robot Learning (CoRL), 2025. [PDF] [Website] [Video] |
|
Zongzheng Zhang, Haobo Xu, Zhuo Yang, Chenghao Yue, Zehao Lin, Huan-ang Gao, Ziwei Wang, Hao Zhao 9th Conference on Robot Learning (CoRL), 2025. [PDF] [Website] |
|
Guanxing Lu*, Tengbo Yu*, Haoyuan Deng, Season Si Chen, Yansong Tang, Ziwei Wang IEEE International Conference on Computer Vision (ICCV), 2025. [PDF] [Website] [Video] [Code] |
|
Guanxing Lu*, Baoxiong Jia*, Puhao Li*, Yixin Chen, Ziwei Wang, Yansong Tang, Siyuan Huang IEEE International Conference on Computer Vision (ICCV), 2025. [PDF] [Website] [Code] |
|
Tengbo Yu*, Guanxing Lu*, Zaijia Yang*, Haoyuan Deng, Season Si Chen, Jiwen Lu, Wenbo Ding, Guoqiang Hu, Yansong Tang, Ziwei Wang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. [PDF] [Code] |

|
Zhenyu Wu, Ziwei Wang, Xiuwei Xu, Jiwen Lu, Haibin Yan IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. [PDF] [Website] [Code] |
|
Zhenyu Wu, Yuheng Zhou, Xiuwei Xu, Ziwei Wang, Haibin Yan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. [PDF] [Website] |
|
Hang Yin*, Xiuwei Xu*, Linqing Zhao, Ziwei Wang, Jie Zhou, Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. [PDF] [Code] |
|
Wenxuan Guo*, Xiuwei Xu*, Ziwei Wang, Jianjiang Feng, Jie Zhou, Jiwen Lu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR, Highlight), 2025. [PDF] [Code] [中文解读] |
|
Guanxing Lu, Ziwei Wang, Changliu Liu, Jiwen Lu, Yansong Tang The Thirteenth International Conference on Learning Representations (ICLR), 2025 [PDF] [Website] [Video] |
|
Xiuwei Xu, Huangxing Chen, Linqing Zhao, Ziwei Wang, Jie Zhou, Jiwen Lu The Thirteenth International Conference on Learning Representations (ICLR, Oral), 2025 [PDF] [Website] [Code] [Video] |

|
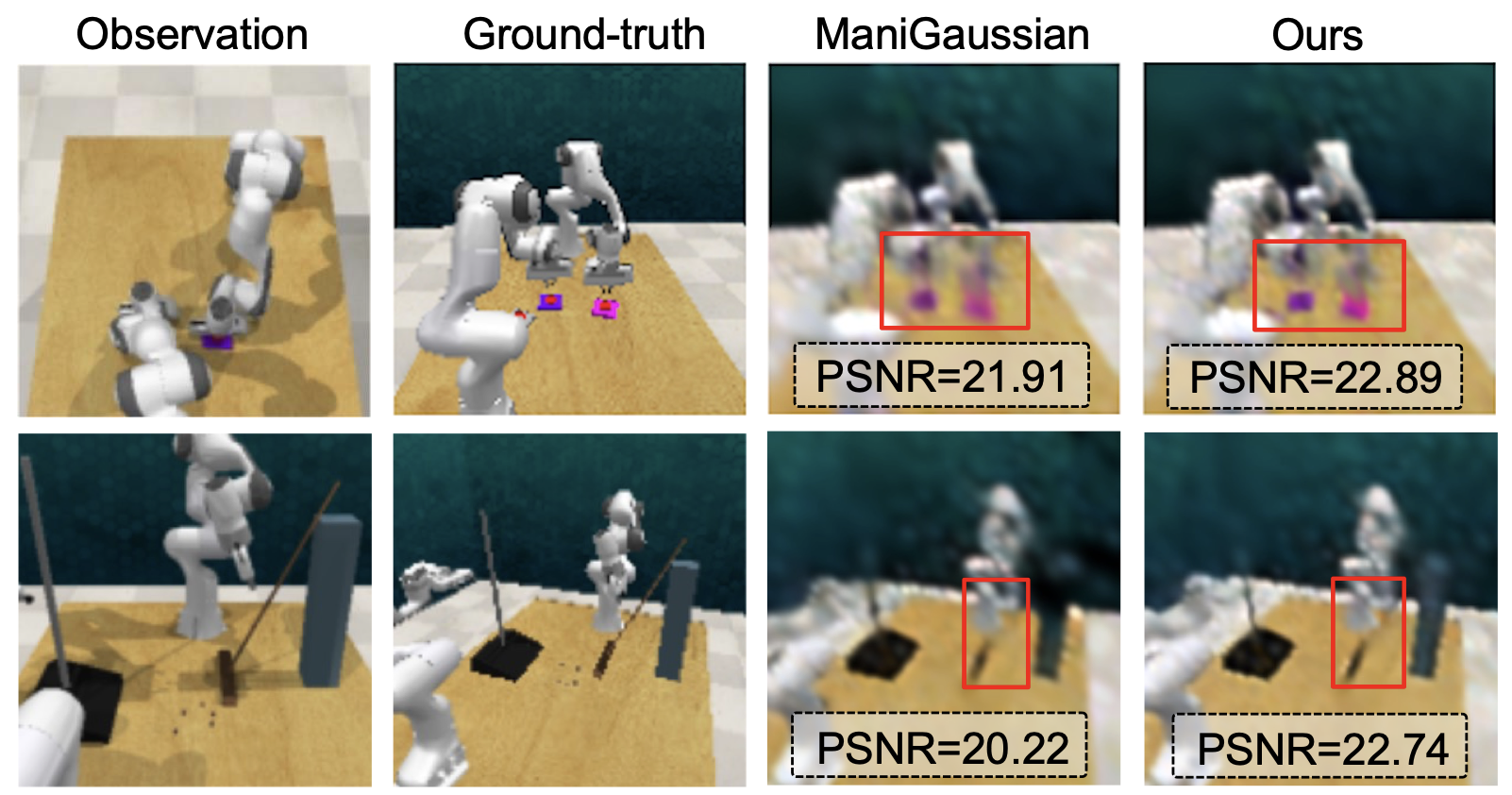
Guanxing Lu, Shiyi Zhang, Ziwei Wang†, Changliu Liu, Jiwen Lu, Yansong Tang European Conference on Computer Vision (ECCV), 2024 [PDF] [Code] [Website] |
|
|
|
|
© Ziwei Wang | Last update: Feb. 4, 2026
|
|